NT5TU256M4DE-AD
NT5TU256M4DE-AD is 1Gb DDR2 SDRAM manufactured by Nanya.
- Part of the NT5TU256M4GE comparator family.
- Part of the NT5TU256M4GE comparator family.
Feature
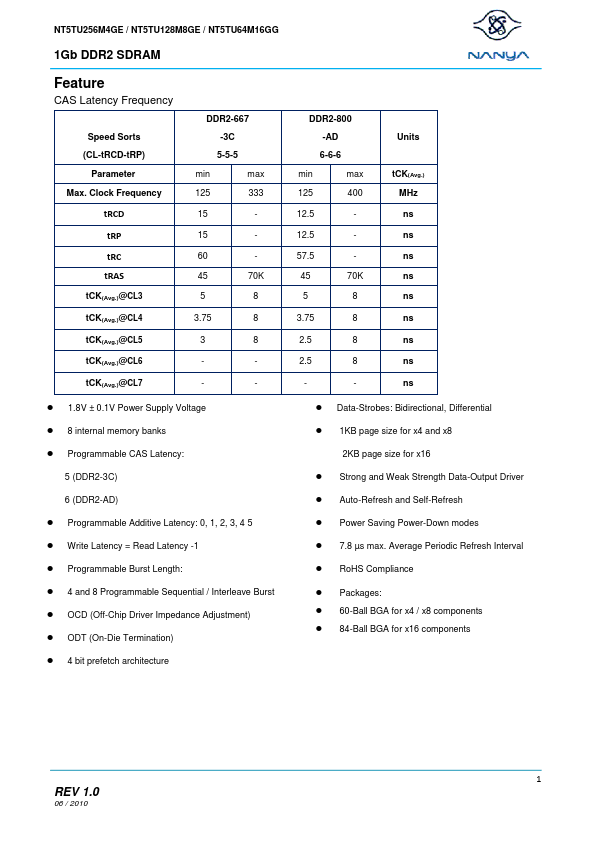
CAS Latency Frequency
DDR2-667 Speed Sorts (CL-t RCD-t RP) Parameter Max. Clock Frequency min 125 15 15 60 45 5 3.75 3 -3C 5-5-5 max 333 70K 8 8 8 min 125 12.5 12.5 57.5 45 5 3.75 2.5 2.5
- - DDR2-800 -AD 6-6-6 max 400 70K 8 8 8 8 t CK(Avg.) MHz ns ns ns ns ns ns ns ns ns Units t RCD t RP t RC t RAS t CK(Avg.)@CL3 t CK(Avg.)@CL4 t CK(Avg.)@CL5 t CK(Avg.)@CL6 t CK(Avg.)@CL7
- -
- 1.8V ± 0.1V Power Supply Voltage 8 internal memory banks Programmable CAS Latency: 5 (DDR2-3C) 6 (DDR2-AD)
Data-Strobes: Bidirectional, Differential 1KB page size for x4 and x8 2KB page size for x16
- -
- -
- -
- -
Strong and Weak Strength Data-Output Driver Auto-Refresh and Self-Refresh Power Saving Power-Down modes 7.8 µs max. Average Periodic Refresh Interval Ro HS pliance Packages: 60-Ball BGA for x4 / x8 ponents 84-Ball BGA for x16 ponents
- -
- -
- -
- Programmable Additive Latency: 0, 1, 2, 3, 4 5 Write Latency = Read Latency -1 Programmable Burst Length: 4 and 8 Programmable Sequential / Interleave Burst OCD (Off-Chip Driver Impedance Adjustment) ODT (On-Die Termination) 4 bit prefetch architecture
REV 1.0
06 / 2010
NT5TU256M4GE / NT5TU128M8GE / NT5TU64M16GG
1Gb DDR2 SDRAM
Description
The 1giga-bit (1Gb) Double-Data-Rate-2 (DDR2) DRAMs is a high-speed CMOS Double Data Rate 2 SDRAM containing 1,073,741,824 bits. It is internally configured as an octal-bank DRAM. The 1Gb chip is organized as 32Mbit x 4 I/O x 8 bank, 16Mbit x 8 I/O x 8 bank or 8Mbit x 16 I/O x 8 bank device. These synchronous devices achieve high speed double-data-rate transfer rates of up to 800 Mb/sec/pin for general applications. The chip is designed to ply with all key DDR2 DRAM key features
: (1) posted CAS with additive latency, (2) write latency = read latency -1, (3) normal and weak strength data-output driver, (4) variable data-output impedance adjustment and (5) an ODT (On-Die Termination) function.
All of the control and address inputs are synchronized with a pair of externally supplied differential...