Overview
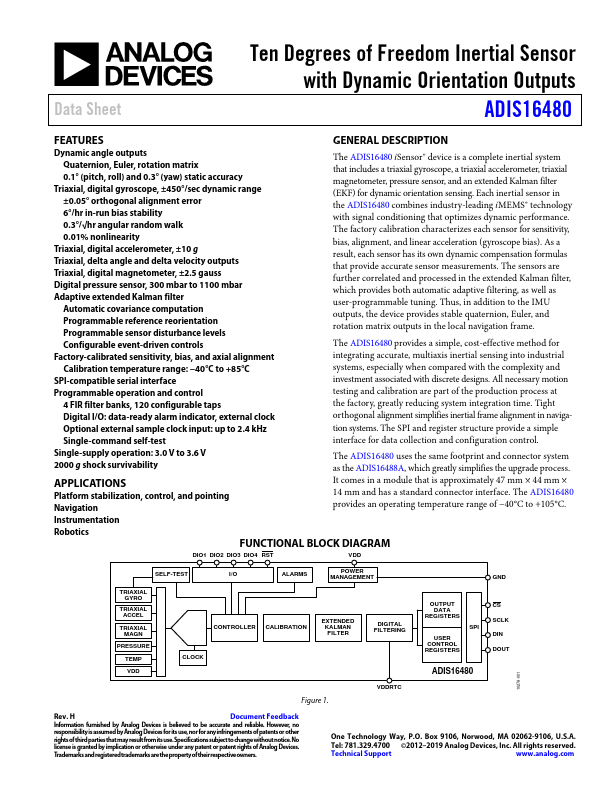
Dynamic angle outputs Quaternion, Euler, rotation matrix 0.1° (pitch, roll) and 0.3° (yaw) static accuracy Triaxial, digital gyroscope, ±450°/sec dynamic range ±0.05° orthogonal alignment error 6°/hr in-run bias stability 0.3°/√hr angular random walk 0.01% nonlinearity Triaxial, digital accelerometer, ±10 g Triaxial, delta angle and delta velocity outputs Triaxial, digital magnetometer, ±2.5 gauss Digital pressure sensor, 300 mbar to 1100 mbar Adaptive extended Kalman filter Automatic covariance computation Programmable reference reorientation Programmable sensor disturbance levels Configurable event-driven controls Factory-calibrated sensitivity, bias, and axial alignment Calibration temperature range: -40°C to +85°C SPI-compatible serial interface Programmable operation and control 4 FIR filter banks, 120 configurable taps Digital I/O: data-ready alarm indicator, external clock Optional external sample clock input: up to 2.4 kHz Single-command self-test The ADIS16480 iSensor® device is a complete inertial system that includes a triaxial gyroscope, a triaxial accelerometer, triaxial magnetometer, pressure sensor, and an extended Kalman filter (EKF) for dynamic orientation sensing. Each inertial sensor in the ADIS16480 combines industry-leading iMEMS® technology with signal conditioning that optimizes dynamic performance.